
Auf Linie bleiben
Kollisionsfreie Bewegungen für die Tele- und minimalinvasive Chirurgie
Bei der für den Patienten vorteilhaften minimalinvasiven Chirurgie werden in großen Krankenhäusern häufig Telemanipulatoren eingesetzt. Diese robotergestützten Systeme ermöglichen Eingriffe auf Entfernung. Die Präzision und die Bewegungsfreiheit der chirurgischen Instrumente werden durch den Einsatz von Telemanipulatoren erhöht. Der Chirurg entscheidet auf Basis seiner Erfahrungswerte, wo der Telemanipulator platziert wird, welche Bewegungen er ausführt und wo die Zugänge am Körper des Patienten angelegt werden. Bedingt durch die eingeschränkte Sicht während der Operation, aber auch durch die komplexe Kinematik der gebräuchlichen Telemanipulatoren kann es dabei zu ungewollten Kollisionen der Roboterarme kommen.
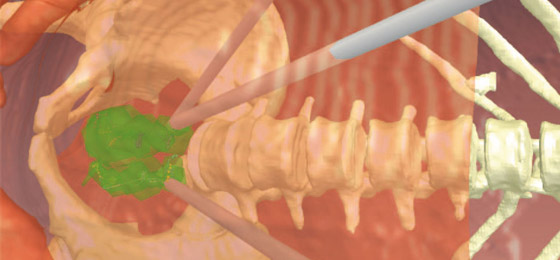
Patientenmodell, chirurgische Instrumente und Arbeitsraum der Instrumente (Quelle: Institut für Prozessrechentechnik, Automation und Robotik)
Wissenschaftler des Instituts für Prozessrechentechnik, Automation und Robotik optimieren die Position der Zugänge und die Position des Telemanipulatorsystems, um die Gefahr solcher Kollisionen zu minimieren, die Beweglichkeit zu erhöhen und dem Chirurgen den bestmöglichsten Überblick zu gewähren. Der Kollisionsvermeidung liegt eine Simulationsumgebung zugrunde, die ein Patientenmodell und das kinematische Modell des Telemanipulators kombiniert.
Um eine kollisionsfreie Operation zu ermöglichen, werden drei Parameter bestimmt: die Platzierung der Zugänge auf den Patienten, die Anfangskonfiguration des Telemanipulators sowie die Ausrichtung des Patiententischs. Um hierfür realistische Angaben zu erhalten, wird das Modell durch individuelle Patientendaten erweitert. Der berechnete Ort für die Zugänge wird direkt auf den Körper des Patienten projiziert. Dies ist mit Methoden der Erweiterten Realität möglich.
Auf Basis von früheren Operationen wird ein Ablauf für folgende Operation berechnet. Weicht der Chirurg während der Operation von diesem Ablauf ab, kann das System ihm eine Navigationshilfe bieten und ihm einen Pfad anzeigen, um eine kollisionsfreie Operation zu ermöglichen. Dadurch kann die Sicherheit und Effizienz operativer Eingriffe maßgeblich erhöht werden.
